Feingefühl programmieren: Roboterarme im OP-Einsatz
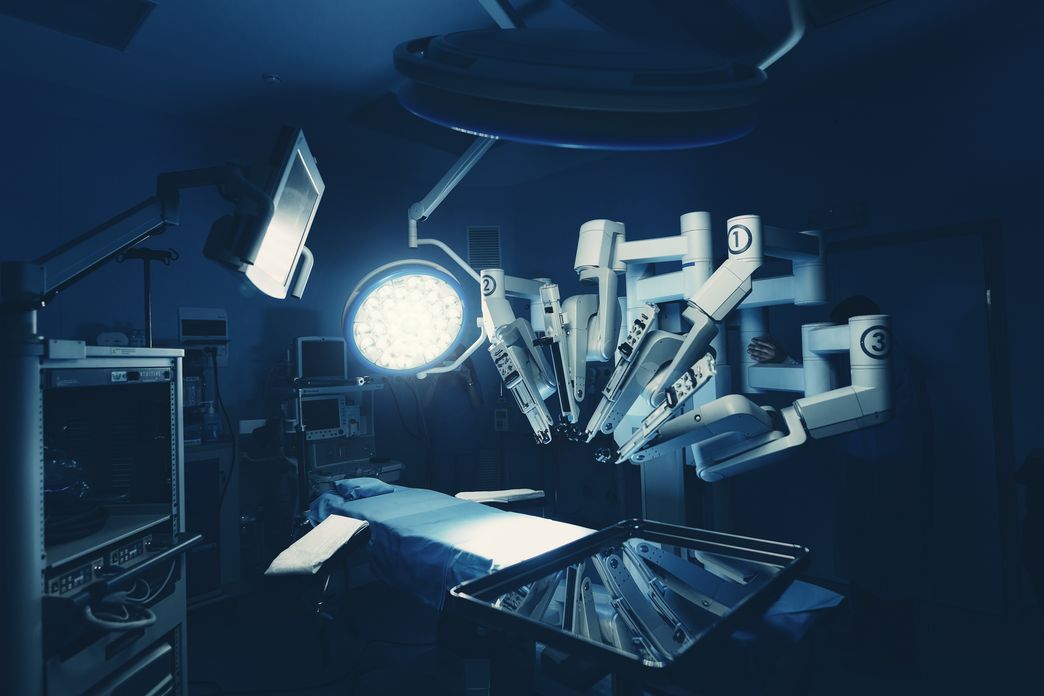
Wie können Menschen und Roboter gemeinsam kniffelige Operationen durchführen - zum Beispiel eine Gallenblasenentfernung? Maschinenbauer Paul Maria Scheikl erforscht an der HIDSS4Health, wie Roboterarme für einen solchen Einsatz programmiert werden müssen. Dabei muss er praktische Erfahrungen aus dem OP-Raum einfließen lassen, um die Roboter-KI zu trainieren.
Wenn Paul Maria Scheikl, 29, bei einer Gallenblasenentfernung im OP zuschaut, wundert er sich immer wieder. Erstaunlich, was die flinken Hände der Chirurgen alles gleichzeitig machen: Mit dem kleinen Metallgreifer das Gewebe packen und dauerhaft auf Spannung halten, damit es Stück für Stück sauber durchtrennt werden kann; die Kamera am Ende des Endoskoparms immer wieder richtig ausrichten, damit Greifer und Schneidinstrument im Bauch des Patienten den Weg zu allen Verästelungen der Gallenblase finden; dabei das Gewebe langsam selbst durchtrennen. „Ich dachte, es wird mit einer kleinen Schere durchschnitten“, sagt Scheikl. Tatsächlich aber schiebt der Chirurg vorsichtig ein kleines Häkchen unter das Gewebe, zieht es zu sich hin, checkt, ob genau der richtige Fitzel im Häkchen liegt und durchtrennt dann die feinen Fasern durch Erhitzung – damit auch die kleinsten Blutgefäße sofort verödet werden. „Darauf muss man erstmal kommen“, sagt Scheikl und lacht.
Paul Maria Scheikl ist Maschinenbauer und Data Scientist. Seit Sommer 2020 forscht er für seine Doktorarbeit an der Graduiertenschule HIDSS4Health. Die School ist Teil der Helmholtz Information & Data Science Academy (HIDA), Deutschlands größtem postgradualen Ausbildungsnetzwerk in Datenwissenschaften. Scheikl ist an der Graduiertenschule einer von 37 Promovierenden, die ein besonderes Programm für Nachwuchswissenschaftlerinnen und –wissenschaftler durchlaufen: Hier suchen Mediziner, Life Scientists und Datenwissenschaftler zusammen nach neuen Erkenntnissen und Methoden in der Gesundheitsforschung, von Genanalysen bis zu Robotik für Operationen. Dafür kooperieren das Deutsche Krebsforschungszentrum DKFZ in Heidelberg, die Universität Heidelberg und das Karlsruher Institut für Technologie KIT.

Das Wissen von Ingenieuren und Medizinern zusammenführen
Vor seiner Promotion hatte Maschinenbauer Scheikl mit Gallenblasen und OP-Besteck nichts zu tun, nun aber schaut er den Chirurgen - wann immer möglich - genau auf die Finger. Denn in seiner Doktorarbeit will er herausfinden: Wie müssen Roboterarme programmiert sein, damit sie Ärzten bei Gallenblasenoperationen effektiv assistieren können? „Mir war gar nicht klar, wie unglaublich viele kleine Schritte dabei aufeinander abgestimmt werden müssen“.
Im engen Austausch mit den Life Science-Experten an der HIDSS4Health sucht der 29-Jährige Schritt für Schritt nach dem richtigen Weg. Besonders kniffelig wird es, wenn Roboter und Mensch minutiös zusammenarbeiten müssen: Die Konstruktion von Geräten für Menschen folgt etwa ergonomischen Kriterien, ein Roboterarm aber kann alles Runde nur sehr schlecht greifen. „Das Feedback der Mediziner ist enorm wichtig. Als Ingenieur verliert man sich sonst schnell in technischen Details und übersieht, was für Chirurgen relevant ist“, sagt Scheikl. „Umgekehrt haben Mediziner natürlich weniger Einblick in das, was technisch machbar ist.“
Paul Maria Scheikl kommt aus Heidelberg. Schon im Maschinenbaustudium am Karlsruher Institut für Technologie (KIT) hat er früh gemerkt, dass ihn nicht schwere Industrieanlagen, sondern filigrane Robotik interessiert. Und da am KIT Robotik bei der Informatik angesiedelt ist und nicht im Fachbereich Maschinenbau, rutschte er schleichend auf das Feld Robotik, erzählt Scheikl. Der Mix fasziniert ihn. „Er ist mathematischer und wissenschaftlich anspruchsvoll, aber gleichzeitig anwendungsbezogener als theoretische Informatik.“ Für den Master entwickelte er schließlich ein Programm, das Assistenzrobotern in der Pflege die Mensch-Robotik-Interaktion beibringt. Etwa einen heruntergefallenen Schlüssel vom Boden aufheben und dem pflegebedürftigen Menschen reichen. Schon das ist kniffelig. Wann soll der Maschinenarm zugreifen, wann loslassen, wie bekommt man das ganze koordiniert? „Ich wollte immer Probleme lösen, nicht Aufgaben abarbeiten“, sagt Scheikl. „Es macht mir unheimlich Spaß herauszufinden, ob und wie etwas Neues möglich ist.“
„Ich genieße es sehr, dass ich an der HIDSS4Health nicht mit einem festen Plan antreten musste, sondern so viel Freiheit in der Forschung habe, um Schritt für Schritt den optimalen Weg zur Lösung meiner Forschungsfrage zu finden.“
Paul Maria Scheikl, Doktorand an der HIDSS4Health
An der HIDSS4Health fand Scheikl dafür nach seinem Studienabschluss genau das richtige Umfeld. Bei seiner Promotion wird er ebenso von hervorragenden Fachleuten aus der Medizin und Medizintechnik begleitet wie von Expertinnen und Experten aus der Data Science. „Manche Medizinkollegen und -kolleginnen haben sogar nebenher Medizininformatik studiert, das macht den Austausch noch einfacher“, sagt Scheikl.
Sein Forschungsalltag ist dicht gefüllt. Jeden Tag wälzt er Fachmagazine, schaut Videos von Fachkollegen, sucht Inspirationen bei Forschungsgruppen verwandter Fachbereiche. Welche Methoden bewähren sich? Was könnte ich übernehmen? Bei den enorm verdichteten Vorlesungsreihen von Life Science-Profis und Data Scientists aus unterschiedlichen Institutionen, verschafft er sich schnell den breiten Überblick über sein Forschungsfeld, der nötig ist, um eine geeignete Methode für die Realisierung seines Promotionsziels zu finden. Und wo sonst könnte er sich so leicht hervorragend mit anderen Forscherinnen und Forschern persönlich vernetzen, die Medizinforschung und Datenwissenschaften verbinden? „Ich genieße es sehr, dass ich an der HIDSS4Health nicht mit einem festen Plan antreten musste, sondern so viel Freiheit in der Forschung habe, um Schritt für Schritt den optimalen Weg zur Lösung meiner Forschungsfrage zu finden.“
Vor der Theorie: Training im OP-Saal
Langsam hat sich Scheikl dabei dem Organischen angenähert, hat selbst Gallenblasen von Schweinelebern entfernt. Wie fühlt sich das an? Wie ist das Gewebe beschaffen? Wie lassen sich Fett, Organe und Adern genau voneinander unterscheiden? Er hat die Darstellung der Kameras am endoskopischen Arm erkundet und genau untersucht, wie die Chirurgen das Gewebe bei der OP sehen. Nach „vielen Trainings-Stationen“ durfte Scheikl live bei Operationen dabei sein. Heute noch nennt der Doktorand das einen „Kulturschock“. „Es war unglaublich zu erleben, wie sehr der Fokus der Mediziner darauf liegt, helfen zu wollen.“ Immer wieder wurden geplante OP-Termine verschoben, weil ein Notfall dazwischenkam. Bei jeder OP war für Scheikl „spürbar, dass es darum geht, ein Menschenleben zu retten, nicht ein technisches System zu optimieren, das vielleicht mal irgendwem nutzt. So denken Ingenieure oft, wenn sie wissenschaftlich arbeiten.“
Nun bringt Scheikl dem Roboter bei, es den Chirurgen gleich zu tun. Die Methode hat er inzwischen gefunden: bestärkendes Lernen, Reinforcement learning, wie es in der Fachsprache heißt. Dabei wird der KI nicht vorgeschrieben, wie sie genau vorgehen soll. Sondern das System lernt selbst anhand von Belohnung und negativem Feedback: Das war gut, das war schlecht. „So findet es langsam seine eigene Strategie.“
Dafür muss Scheikl natürlich zunächst selbst herausfinden, was richtig ist, also belohnt werden sollte, und was nicht. Aus Hunderten von Demovideos der Endoskop-Kamera von Gallenblasenentfernungen der Chirurgen erstellt er daher Simulationen von Teilschritten und entwickelt daraus die nötigen Belohnungsinformationen, mit denen das Verhalten des neuronalen Netzes trainiert wird: Gewebe beiseite ziehen, etwas greifen, an konkrete Stellen der Gallenblase manövrieren, ohne etwas zu verletzen. „Bis die KI das wirklich kann, dauert es ewig, schließlich muss sie unendlich viele Details und Grundkompetenzen lernen, für die der Mensch 18 Jahre lang Zeit hatte, bis er überhaupt mit der Medizinerausbildung beginnt“, sagt Scheikl. Von der Hand-Auge-Koordination bis zur schnellen Einordnung von Bilddaten. „Der Roboter fängt bei null an.“

Ein weiter Weg bis zum Einsatz am Menschen
Umso wichtiger ist es, reichlich Sicherheitspuffer einzubauen, bevor die KI am lebenden Organismus loslegt. Daher fragt Scheikl vor jeder nächsten Aktion die KI: Was hast du als nächstes vor – um gegebenenfalls bremsen zu können. Dafür nutzt er selbst in der Simulation „klassische Methoden der Robotik zur Kollisionsvermeidung, als Stützräder“, falls das neuronale Netz mal auf Abwege gerät. Ist es zu zittrig, hat es etwas übersehen? Weichen die Bilddaten eines individuellen Patienten von den Standardmustern ab, die der Roboter gelernt hat, und verwirren ihn? „Lebendige Organismen sind keine Maschinen, Abweichungen kommen häufig vor“, so Scheikl. „Wenn die KI dann etwa vorschlägt, die Bauchdecke zu durchtrennen, erkennen wir an Sensordaten, dass sie auf dem falschen Weg ist und können stoppen.“
Der Weg zum Einsatz am Menschen ist noch weit. Nach erfolgreichen OPs in der Simulation, muss sich die KI zunächst an einer Silikongallenblase, dann an einem Organ vom Schlachthof und schließlich am lebenden Schwein bewährt haben, bis sie, irgendwann einmal, Seite an Seite mit Chirurgen am Menschen eingesetzt werden könnte. Viele Probleme sind noch zu lösen. Und genau das ist es, was Scheikl reizt. Wie etwa kann er dem Roboter, einem Ding aus Metall, so etwas wie Fühlen beibringen, das so wichtig ist für die Arbeit mit feinen Instrumenten im Inneren eines Körpers? Also „die Fähigkeit zu erfassen und verständlich an den Arzt weiterzugeben, was vorne an Interaktionskräften zwischen Gewebe und Instrument passiert“, wie es Scheikl beschreibt. Und wie gelingt es, die Kommunikation zwischen Mensch und Maschine im OP für beide Seiten verständlich zu machen? „Wenn das Gewebe gerade vom Instrument verdeckt ist, und der Mensch sagt ‚Ich seh‘ so nix‘, kann ein neuronales Netz nichts damit anfangen.“ Scheikl grinst. „Spannend, dafür eine Lösung zu suchen, oder?“
Zwei Jahre hat der Doktorand noch Zeit, um sie zu finden. Sein großer Traum: Es bis zum Versuch am lebendigen Tier zu schaffen. Hier, an der HIDSS4Health, hat er optimale Voraussetzungen dafür, dass ihm das gelingt. „Es ist einfach großartig an der Schnittstelle von Medizin, Maschinenbau und Data Science etwas Sinnvolles tun zu können, das wirklich zählt.“
Autorin: Anja Dilk